| | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | | |
| |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
Bevor ich so richtig loslegen konnte, stand natürlich die Frage im Raum, was für ein Unterwasserfahrzeug es werden sollte. Im Internet war viel zu sehen, aber sämtliche militärischen Varianten oder Boote, die diesen im Aussehen ähnelten, wollte ich auf keinen Fall bauen. Meine Vorstellungen gingen mehr in Richtung "Forschungs-U-Boot". Mit so einem Ding war ich 2009 selbst in 330m Tiefe gewesen und das hatte mich fasziniert. Nun gab es zwar die Option, einen relativ genauen Nachbau zu versuchen, aber eine Recherche hinsichtlich der benötigten Materialien war dann doch ernüchternd. Ich beschloss daher, nach dem alten Prinzip zu verfahren, erst einmal die Matariallage zu prüfen und dann zu konstruieren. Ein weiterer zu berücksichtigender Faktor war der vorhandene Maschinenpark und die dadurch vorgegebenen Grenzen.
Tauchsystem:
Zuerst musste festgelegt werden, nach welchem Prinzip das Boot tauchen sollte. Statisches Tauchen mittels Tauchtank wurde abgewählt, zu kompliziert und zu teuer für den ersten Bau. Normales dynamisches Tauchen taugt für U-Boote im Military-Look, da sich diese schnell fortbewegen und damit über die Tiefenruder ausreichend Kraft zum Tauchen entwickeln können. Als Endergebnis wurde die Variante Tauchen mittels eines vertikalen Antriebs gewählt. Die direkte Anordnung von Motoren und Propeller in der Senkrechten nahm zuviel Platz weg, also horizontale Antriebe und Umlenkung des Wasserstroms mittels Segmentkrümmer. Eingebaut wurden normale E-Motore in 40mm-Acrylrohre. Die Wellendurchführung und die Abdichtung übernahmen Bauteile von www.modelluboot.de, die für den Bau herkömmlicher U-Boote vorgesehen waren. Diese Teile wurden auf die Drehbank genommen, im Durchmesser angepasst und mit Nuten für radial dichtende Rundringe versehen. Als Propeller dienten Rennschrauben, die bei Conrad gekauft wurden.
Energieversorgung:
Die Energieversorgung wurde durch 12V-Akkus (Bleigel) vorgenommen. Eingesetzt wurden insgesamt 4 Stück mit je 2,2Ah. Es war also genug Energie für alle Belange vorhanden. Die Hälfte hätte es auch getan (spätere Erfahrung).
Steuerung:
Um das Boot auch bei langsamer Fahrt gut manövrieren zu können (einschließlich Drehen auf der Stelle) konnte hier nicht auf Steuerruder, die über Servos betätigt werden, zurückgegriffen werden. Außerdem sollte die Anzahl der Wanddurchbrüche minimiert werden. Aus diesem Grund wurden zwei getrennt ansteuerbare Antriebseinheiten gewählt.
Rumpf:
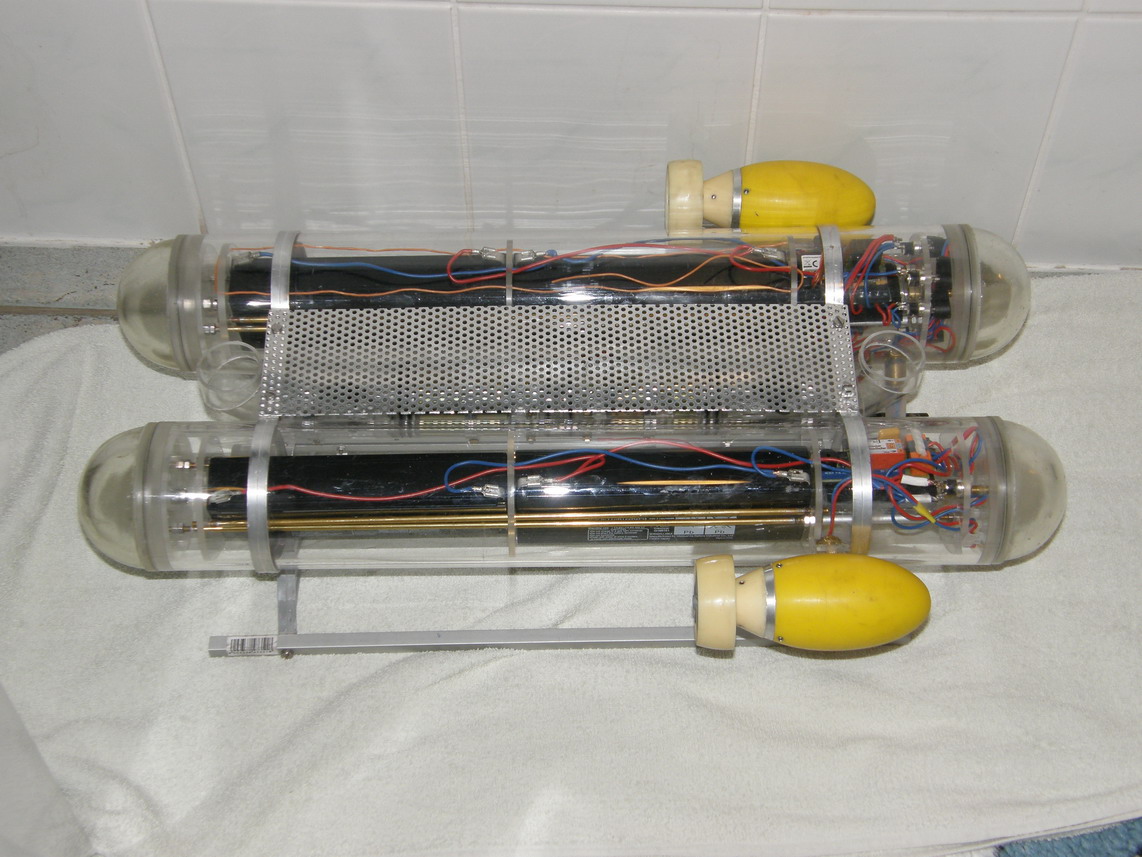
Als Ergebnis aller Vorbetrachtungen stand die Idee, ein Boot zu bauen, das aus zwei nebeneinanderliegenden Röhren bestand, die die Technik aufnehmen sollten. Zwischen den Röhren konnten dann die Tauchantriebe angeordnet werden. Die Antriebe für die Vorwärtsfahrt und das Manövrieren sollten dann außen seitlich an den Röhren angebracht werden. Dadurch versprach ich mir eine möglichst stabiles Fahrverhalten, was sich aber letztlich als Fehlschluss herausstellter. Dazu aber später bei der Diskussion der Ergebnisse.
Als Material sollte Acrylrohr eingesetzt werden, da dieses noch günstig beschaffbar war und wegen der Durchsichtigkeit auch eine Kontrolle der Bauelemente und der Dichtheit ermöglichen sollte.Aber dieses Material hat auch Tücken, die man unbedingt kennen und berücksichtigen muss. Als Abschluss der Röhren waren Halbkugeln, ebenfalls aus Acryl, geplant.
Das mit den Halbkugeln aus Acryl gestaltete sich schwierig, da es keine Bauteile mit einer entsprechenden Wanddicke gab. Die Herstellung mittels einer Vorrichtung zum Blasen der Halbkugeln funktionierte leider nicht, vermutlich habe ich mich da einfach zum dumm angestellt. Also wurden die Halbkugeln aus Polyesterharz gegossen. Das klappte, allerdings ließen sich Lufteinschlüsse nicht verhindern. Die Halbkugeln wurden an den Rändern plangeschliffen und auf Acrylscheiben geklebt, die mit O-Ringen zum axialen Abdichten versehen waren. Je Röhre wurden zwei Halbkugeln verwendet, die innen im Rohr durch einen Zuganker verbunden wurden, der auf jeweils zwei Stränge aufgeteilt wurde, zwischen denen dann die Akkus sowie die Träger für die Technik angeordnet wurden. In den Platten mit den Halbkugeln befanden sich M6-Gewindebohrungen, mittels derer alles zusammengezogen wurde.
Antriebe:
Als Antriebe dienen aus den bereits erwähnten Gründen zwei Motorgondeln, die jeweils im vorderen Bereich jeder Röhre seitlich angeordnet wurden. Dass sollte eine gute Manövrierfähigkeit bei geringstem Aufwand gewährleisten. Die Motorgondeln gibt es neben vielen anderen nützlichen Dingen bei Norbert Brüggen (www.modelluboot.de)
Elektronik:
Bei diesem ersten Projekt sollte der Aufwand so klein wie möglich gehalten werden.
Als Fernsteuerung diente eine einfache 8-Kanal-Fernsteuerung mit 35 MHz (dass diese Frequenz eigentlich für den Flugbetrieb vorbehalten ist, habe ich erst später erfahren, aber da, wo ich fahre, gibt es keine Modellflugzeuge) mit dem entsprechenden Empfänger. Weiterhin wurden 3 Fahrtregler eingesetzt, zwei für den Vortrieb, einer für das Tauchen. Mehr gab es anfangs nicht. Bei der Fahrerprobung zeigte sich aber sehr schnell, dass eine Tiefenbegrenzung und eine Lageregulierung bei der vorliegenden Konstruktion unverzichtbar waren. Dazu aber mehr bei der Schilderung der Erprobung.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
|
|
|
|
|
|
|
|
| |
 | |
| |
 | |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
| |
|
|
|
 |
 | |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| | |
|
|
| |
Materialbeschaffung:
Vor dem Baubeginn stand die Materialbeschaffung. Hier meine wichtigsten 2 Quellen für den ersten Versuch:
Acrylrohre und -platten: http://hbholzmaus.eshop.t-online.de/
U-Boot-Technik: http://modelluboot.de/
Akkus, Kleinteile wie Stecker, Schalter und weiteres Modellbauzubehör gibt es bei Conrad. Bei größeren Objekten lohnt immer die Suche im Netz, denn die Preisunterschiede sind oft heftig. Bei Gießharzen, Gewindestangen aus MS oder Edelstahl und entsprechenden Schrauben und Muttern hilft auch der Baumarkt weiter.
Berarbeitung der Rumpfrohre:
Hier geht nichts ohne Drehbank und die muss auch ausreichend groß sein. Bei mir ist es eine Ferm MD500 mit einem 100er Futter, ein 125er kam später dazu. Um die Rohre mit einer Länge von 500 mm bearbeiten zu können, musste man sich schon etwas einfallen lassen, denn so eine Länge kann man nicht im Futter halten. Die Lösung waren zwei Scheiben aus PVC, ca. 20 mm dick, die gerade so in das Rohr passten. Kleinere Abweichungen wurden durch ein dünnes Klebeband ausgeglichen, das auf den Scheibenumfang gewickelt wurde. Das ist insofern unproblematisch, weil Acrylrohre sowieso nicht exakt rund sind und auch Wanddickenungleichheiten aufweisen.
Die Scheiben wurden dann durch eine Gewindestange verbunden. Mittels einer mitlaufenden Spitze im Reitstock wurde das Gebilde gegen das Futter gedrückt (Zentrierung in der Gewindestange) und so wurde das eim Futter eingespannte Rohr an der gegenseite stabilisiert. Jetzt konnte die jeweilige Strinfläche der Rophre plangedreht werden, um dann am Rundring des Deckels zu dichten.
Um die Deckel herzustellen, wurden Acrylscheiben ausgeschnitten und in der Mitte mit einer M6-Gewindebohrung versehen. Anschließend wurden sie auf einen dazu angefertigten Dorn gespannt und auf der Drehbank fertig bearbeitet. Als letzter Schritt wurde die Halbkugel aus Polyersterharz aufgeklebt.
Um die Rohre zu verbinden, wurden vorn und hinten je eine M10x1mm-Gewindebohrung in die Rohrwandung eingebracht, die dann mit einem entsprechenden Nippel versehen wurden (Anschlussrohr 10x1 mm für Boiler aus der Sanitärtechnik oder selbst gedreht). Die eigentliche Verbindung erfolgte dann über ein Stück Silikonschlauch. PVC-Schlauch sollte man doch vermeiden, denn der verhärtet nach kurzer Zeit, während der Silikonschlauch weich bleibt und dauerhaft dichtet. Die Motorgondeln wurden ebenfalls über Nippel M10x1 mm fest mit den Rohren verbunden
Für die ganze Konstruktion wurde dann ein Gestell aus Aluminium-Flachmaterial und entsprechenden Profilen gebaut (Baumarkt). Vorsicht beim Biegen, das Aluminium ist sehr hart und bricht leicht. Für Verschraubungen wurden vorzugsweise Edelstahlschrauben verwendet (Hornbach ist die die Quelle der Wahl, denn es gibt eine große Auswahl zu relativ niedrigen Preisen), Messing verträgt sich nicht so gut mit Alu und führt zu Korrosionserscheinungen. Die Rohre wurden also mit zwei großen 8-ten (querliegend) verbunden und dann auf Kufen aus Aluprofil gestellt. Die Bilder zeigen das ausreichend genau. Zwischen den Rohren wurden die Tauchantriebe eingebaut. Weitere Technik ga es erst einmal nicht.
Weitere Anbauten:
In der zweiten Stufe wurde dann die Beleuchtung in Form einer kleinen Taucherlampe (LED mit Li-Akku Typ 18650) realisiert und es wurde ebenso ein kabelgebundenes Kameramodul (Platine in 50mm-Acrylrohr) angebaut. Elektrische Verbindungen wurden nicht isoliert, sondern an offen im Wasser liegenden Anschlüssen hergestellt. Da der Einsatz nur im Süßwasser stattfinden sollte, war das bei der Versorgungsspannung von 12 V kein Problem. Beim Test in der Badewanne waren aber in dem sehr harten, salzreichen Berliner Wasser deutlich elektrolytische Erscheinungen zwischen den Kontakten, die über MS-Schrauben nach außen geführt wurden, erkennbar und die Kontakte korrodierten schnell. Für eine endgültige Lösung taugte diese Variante also nicht. Später kamen noch ein Modul für die Tiefenbegrenzung und für die Lagestabilisierung hinzu, die im Rahmen der Tests beschrieben werden. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
|
|
|
|
|
|
|
|
|
| |
 | |
 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| | |
|
|
|
Fahr- und Taucheigenschaften
Nach Fertigstellung der Grundausrüstung ging es zu ersten Erprobungen in die Badewanne. Das Modell wurde so tariert, dass es waagerecht im Wasser lag und nur minimal über die Wasseroberfläche hinausragte, um die erforderliche Motorleistung beim Tauchen klein zu halten.
Zuerst einmal die Fahrversuche, soweit diese in der Badewanne durchgeführt werden konnten.
Die Motorgondeln trieben das Fahrzeug schnell vorwärts und es zeigte sich sofort, dass die Motorleistung in Verbindung mit der 5-Blatt-Schraube eigentlich viel zu hoch war. Das ließ sich natürlich über die Fernsteuerung erst einmal regulieren. Später wurden dann 2-flüglige Schrauben eingesetrzt, die weniger Vortrieb brachten und eine bessere Kontrolle ermöglichten. Auch Rückwärtsfahrt und das Drehen des Fahrzeuges waren kein Problem. Insofern stimmte das Verhalten des Fahrzeuges mit der Planung überein.
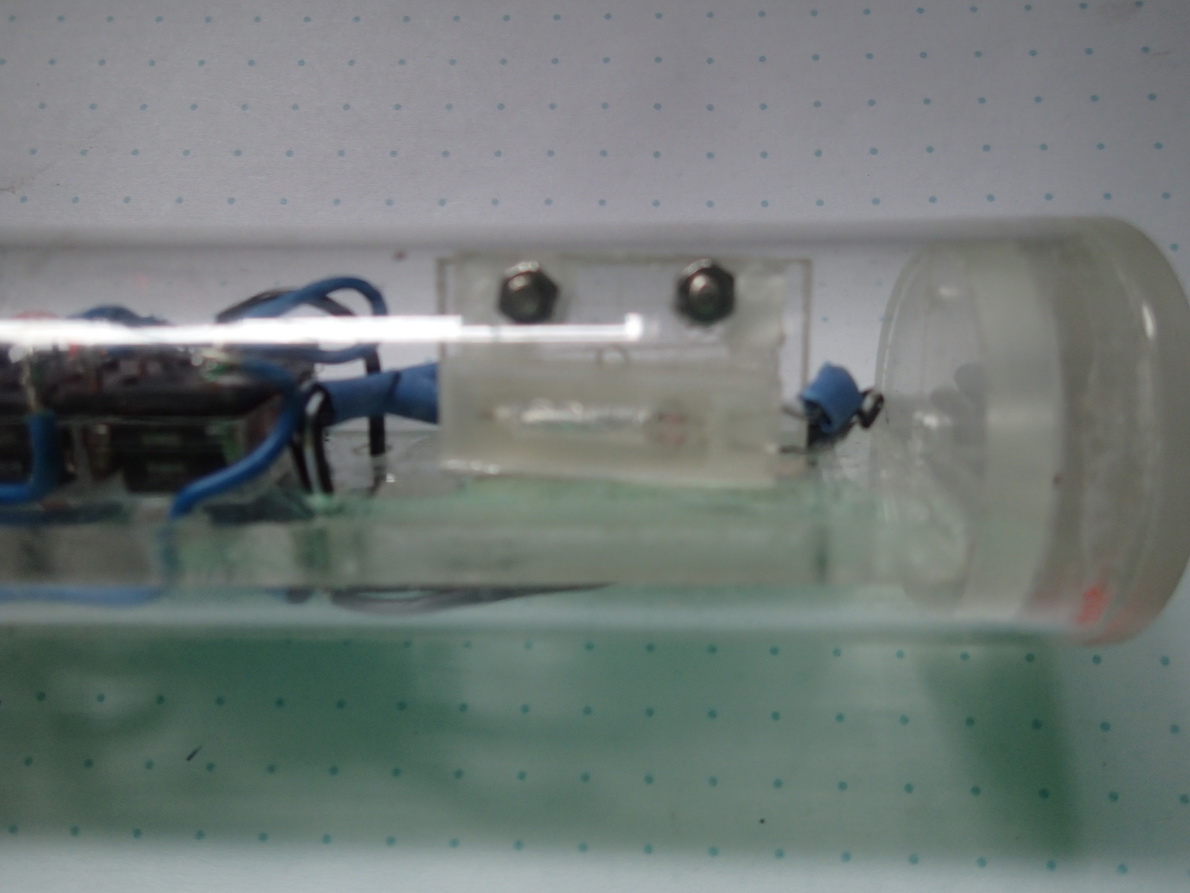
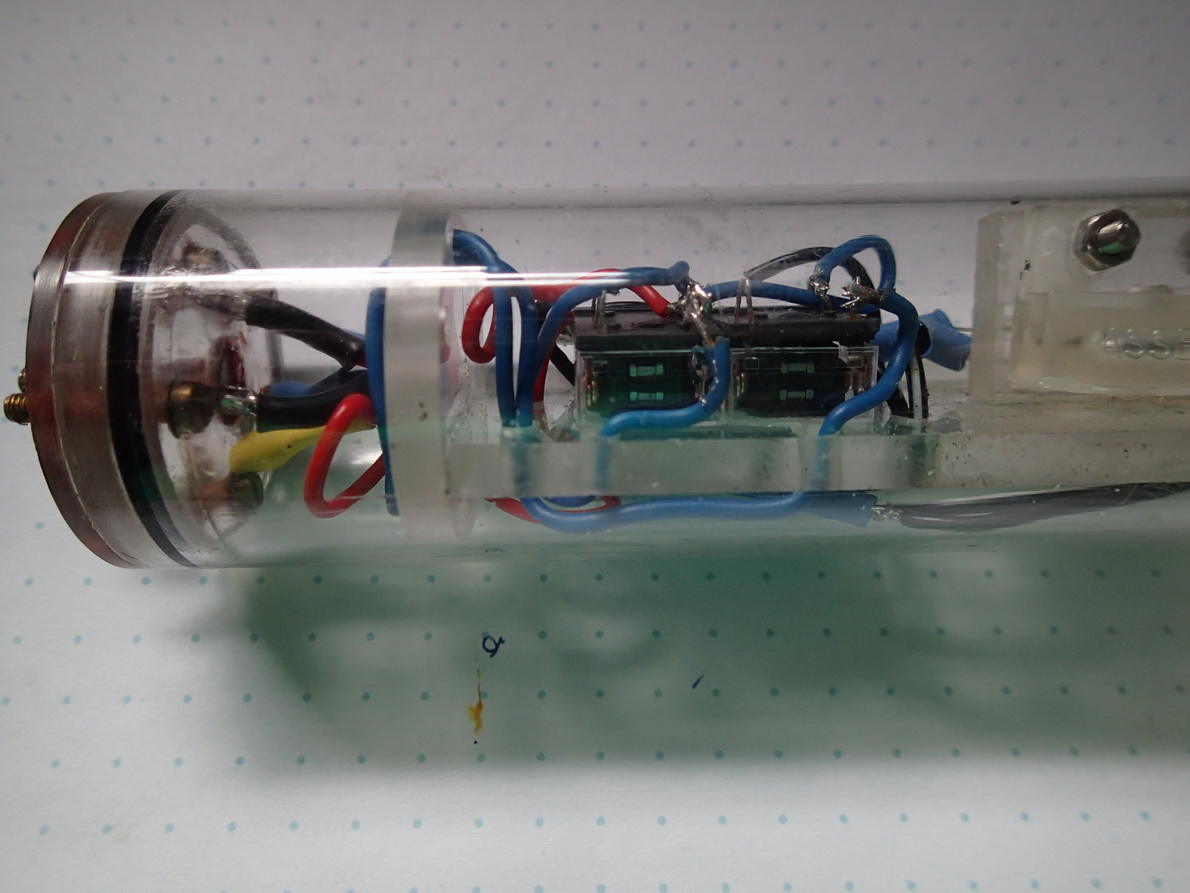
Dann die Tauchversuche. Die Motore in Verbindung mit Rennschrauben und den Umlenkkrümmern brachten genug Leistung, um das Boot unter Wasser zu drücken. Es gab aber reichlich Probleme. Zuerst einmal drehte sich das Boot langsam auf der Stelle, hervorgerufen durch die gleichsinnige Rotation der beiden Wasserahlen aus den Krümmern. Das ließ sich durch die Verwendung gegenläufig drehender Propeller leicht beseitigen. Dann aber das nächste Problem. Beide Antriebsmotore wurden über einen Kanal und einen Regler betrieben. Trotzdem arbeiteten sie nicht völlig gleichmäßig, denn man kann nicht davon ausgehen, dass sich erst einmal die elektrische Energie automatisch genau zur Hälfte auf beide Antriebe verteilt und dann hängt die Umsetzunmg in mechanische Energie von zahlreichen Faktoren (z. B. Fertigungstoleranzen, unterschiedliche Reibung in den Lagern usw.) ab, sodass sich ein Gleichlauf nie einstellen wird. Also taucht das Boot immer mit irgendeinem Ende stärker ab als mit dem anderen. Das alles weiß man dann aber erst hinterher. Zuerst hatte ich die Idee, der Sache mit entsprechend definierten Tragflächen beizukommen, die durch den Strömungswiderstand das zu starke Absinken eines Endes entgegenzuwirken. Das erschien dann doch etwas aussichtslos und so musste also regelungstechnisch eingegriffen werden. An eine Elektronik wollte ich hier noch nicht ran und es war in den Rohren dafür auch kein Platz mehr. Ein weiterer Fahrtregler wäre auch erforderlich gewesen. Also griff ich zu einer etwas brutaleren Lödung und baute zwei Quecksilber-Neigungsschalter in ein 40mm-Acrylrohr, führt die Kontakte nach außen und ließ die Stromversorgung der Tauchmotore so über die Schalter bzw. durch sie betätigte Relais laufen, dass sich der tiefer liegende Motor jeweils kurz abschaltete. Das war eine sehr einfache und preisgünstige Lösung. Bei dieser Aktion wurde auch gleich ein Druckschalter, der ein Relais ansteuerte, mit eingebaut und so hatte ich auch gleich eine Tiefenbegrenzung, wobei nur auf die Maximaltiefe begrenzt werden konnte. Unterschiedliche Tiefen waren nicht einstellbar.
Damit waren die Hauptprobleme gelöst und es konnten bei warmen Wetter dann auch Fahrversuche in einem Swimmingpool erfolgreich durchgeführt werden. Allerdings befriedigten diese natürlich nicht alle Wünsche und so wurde schon an dieser Stelle über einen Neubau nachgedacht, der aber aus Kostengründen unter Verwendung etlicher Teile der ersten Variante erfolge sollte. Außerdem weiß man ja, dass alte Fahrzeuge dann doch nur rumstehen und vergammeln.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| |
|
|
|
| |
Startseite |
|
|
