| |
Einsatzparameter
Das dritte ROV sollte nun geeignet sein, größere Tiefen zu erreichen. Als Grenze wurden 50 m angenommen, also 5 bar Wasserdruck. Dementsprechend veränderte sich auch die Materialauswahl. Weiterhin sollte auf ein ausreichendes Raumangebot für diverse Einbauten geachtet werden, denn erfahrungsgemäß wird es zum Schluss immer knapp. Die Steuerung (siehe extra Kapitel) musste nun über Kabel erfolgen, denn Funkwellen versagen hier. Im ersten Schritt ist aber geplant, die grundlegende Tests (Fahreigenschaften, Abtauchen, Lageverhalten) mittels vorhandener Funkfernsteuerung vorzunehmen, um nicht alle neuen Komponenten auf einmal prüfen zu müssen.
Beim Gehäuse werden die Erfahrungen aus den ersten zwei Bauten hinsichtlich der Lage des Schwerpunktes berücksichtigt, um möglichst auf zusätzliche Lageregler verzichten zu können (wird sich noch zeigen) bzw. diese einfacher zu gestalten. Bei der Materialauswahl wurde auf Metall weitgehend verzichtet, um Korrosionsproblemen aus dem Weg zu gehen. Hinsichtlich der Druckfestigkeit wurde auf Bauteile zurückgegriffen, die von sich aus eine zertifizierte Druckfestigkeit nachweisen konnten. Damit geht man allen Berechnungen aus dem Weg. Die Verarbeitung sollte ebenfalls einfach sein.
Werkstoffauswahl
Der Werkstoff meiner Wahl war daher PVC. Hier gibt es preiswerte Druckrohre für die Trinkwasserinstallation in unterschiedlichen Nenndruckstufen, wobei ND 10 und ND 16 wohl die interessantesten sind. Zwar bezieht sich der Nenndruck auf Belastung durch Druck von innen, bei den verwendeten kurzen Rohrlängen und den Versteifungen durch die Deckelkonstruktionen auf beiden Seiten kann man mit Sicherheit von zulässigen Tauchtiefen von 50 m bzw. 100 m ausgehen. Eine exakte Berechnung für Belastung durch Außendruck nach Druckbehälterverordnung ist schwierig, da die erforderlichen Werkstoffparameter nur schwer zu beschaffen sind. Ich habe hier auf ND 10 zurückgegriffen, da diese Tauchtiefe ausreichend ist. Rohre und Fittings bekommt man günstig z. B. bei https://www.hgt-technik.de/.
Energieversorgung
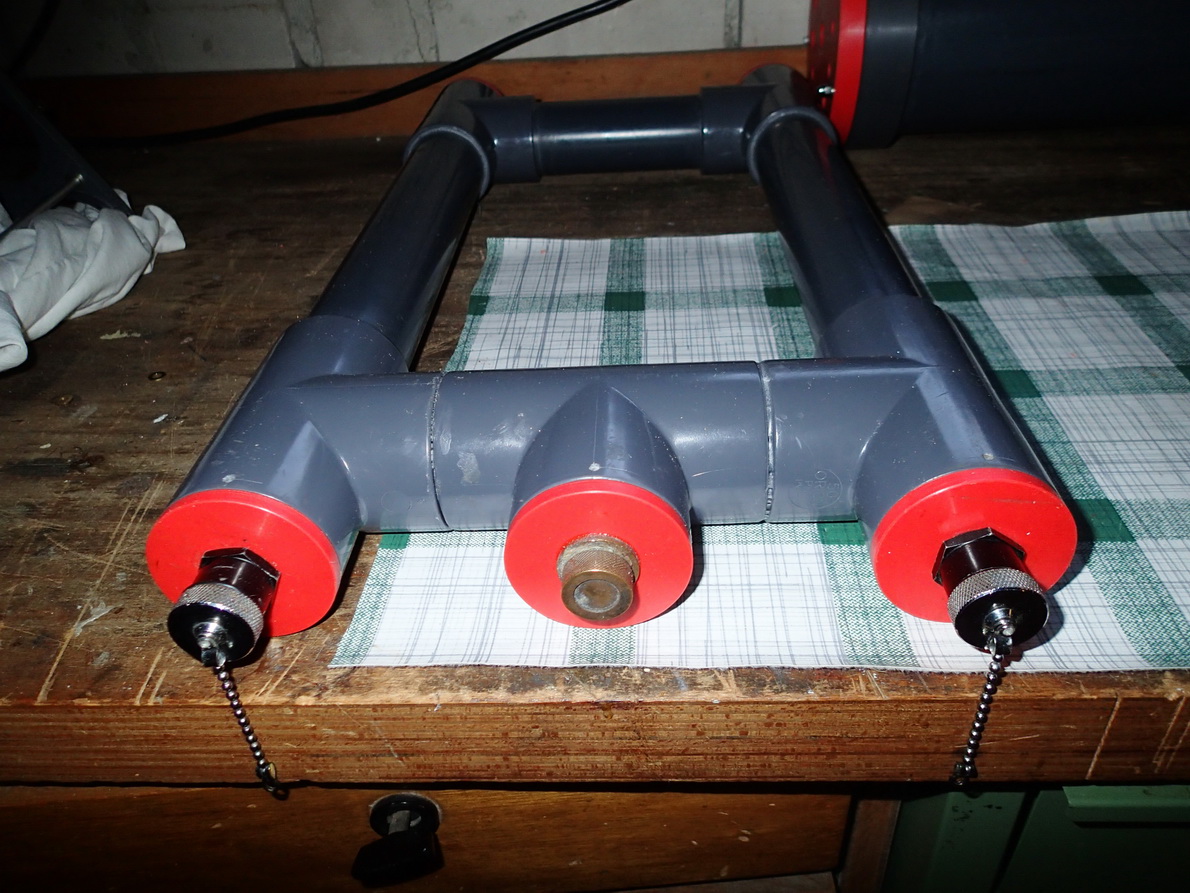
Wie bereits bei ROV2 sollten LiFe-Akkus aus Gründen, die bereits dort erläutert wurden zum Einsatz kommen. Wegen des generellen Aufbaus des ROV und der gewünschten Trennung von Akku und restlicher Elektronik usw. wurde eine zylindrische Bauform mit 15 Ah Kapazität gewählt. Je 2 Stück passen in jedes Rahmenrohr. Vorn werden die beiden Akkusäulen durch eine MS-Schiene verbunden, hinten befinden sich die Anschlüsse plus und minus sowie eine Lagebuchse mit Balancer-Anschluss. Für Kabel, wasserdichte Durchführungen sowie Buchsen und Stecker wurden Bauteile von DEV-Pein verwendet (Altteile aus einer alten UW-Videobeleuchtung). Die Kabel haben 4 Adern a 1,5 mm², also je Pol insgesamt 6 mm², was ausreichend sein dürfte. Im Zentralrohr befindet sich dann eine 40A-Sicherung sowie für das Einschalten entsprechende Microtaster, die von außen über einen Nocken geschaltet werden
.
Antriebseinheit
Die Dinger heißen ja neudeutsch Thruster, aber machen auch nichts anderes. Hier sollten auf jeden Fall Brushless-Motore eingesetzt werden, allerdings nicht frei im Wasser liegend. Recherchen und eigene Erfahrungen mit gekauften Systemen hatten ergeben, dass es doch immer wieder zu Korrosionsproblemen kommt. Da leider die jetzt von ROV-CONTROL angebotenen Thruster, die einen sehr guten Eindruck machen und auch preislich in Ordnung sind, noch nicht bekannt waren und auch nicht zur Verfügung standen, blieb nur die Eigenentwicklung gekapselter Antriebe mit magnetischer Kupplung. Falls sich diese nicht bewähren, wird auf die letztgenannten Thruster zurückgegriffen werden müssen, wobei dann die Platzprobleme zu lösen sind.
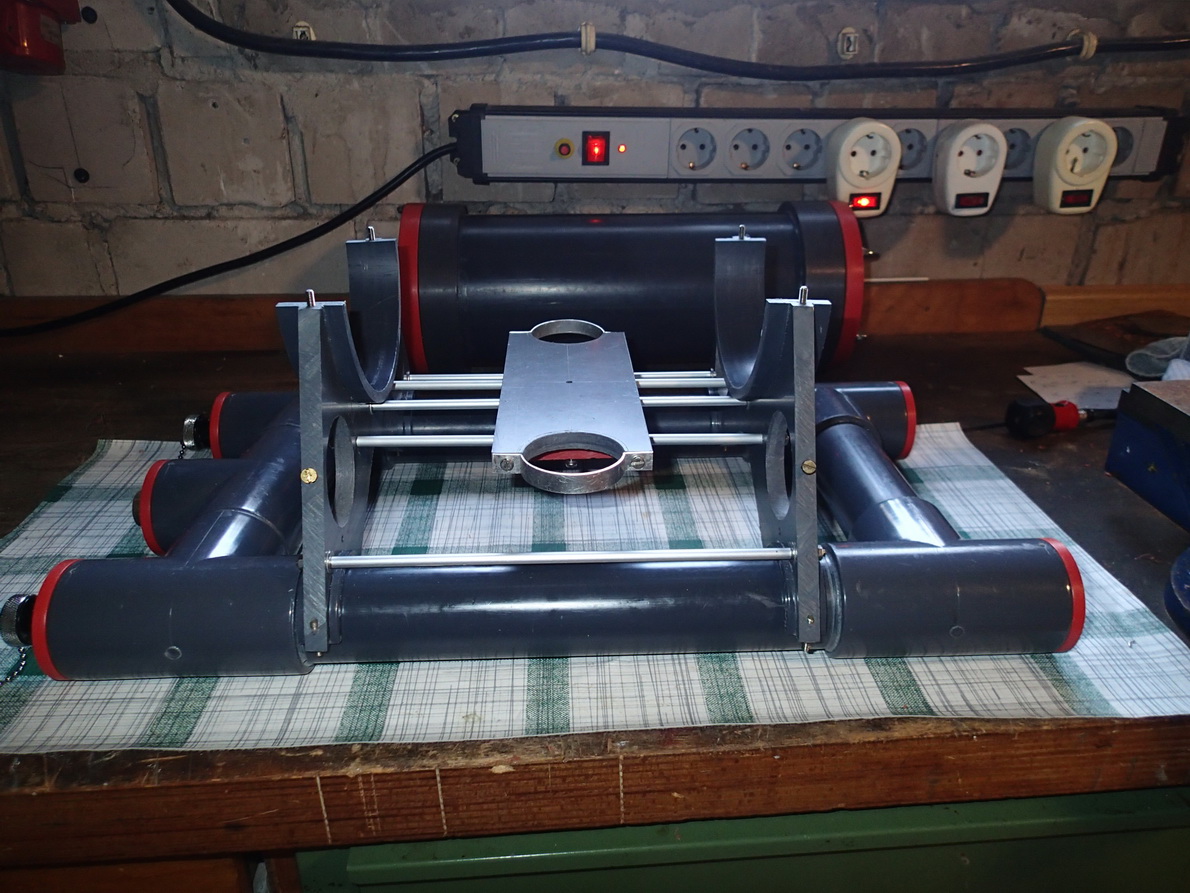
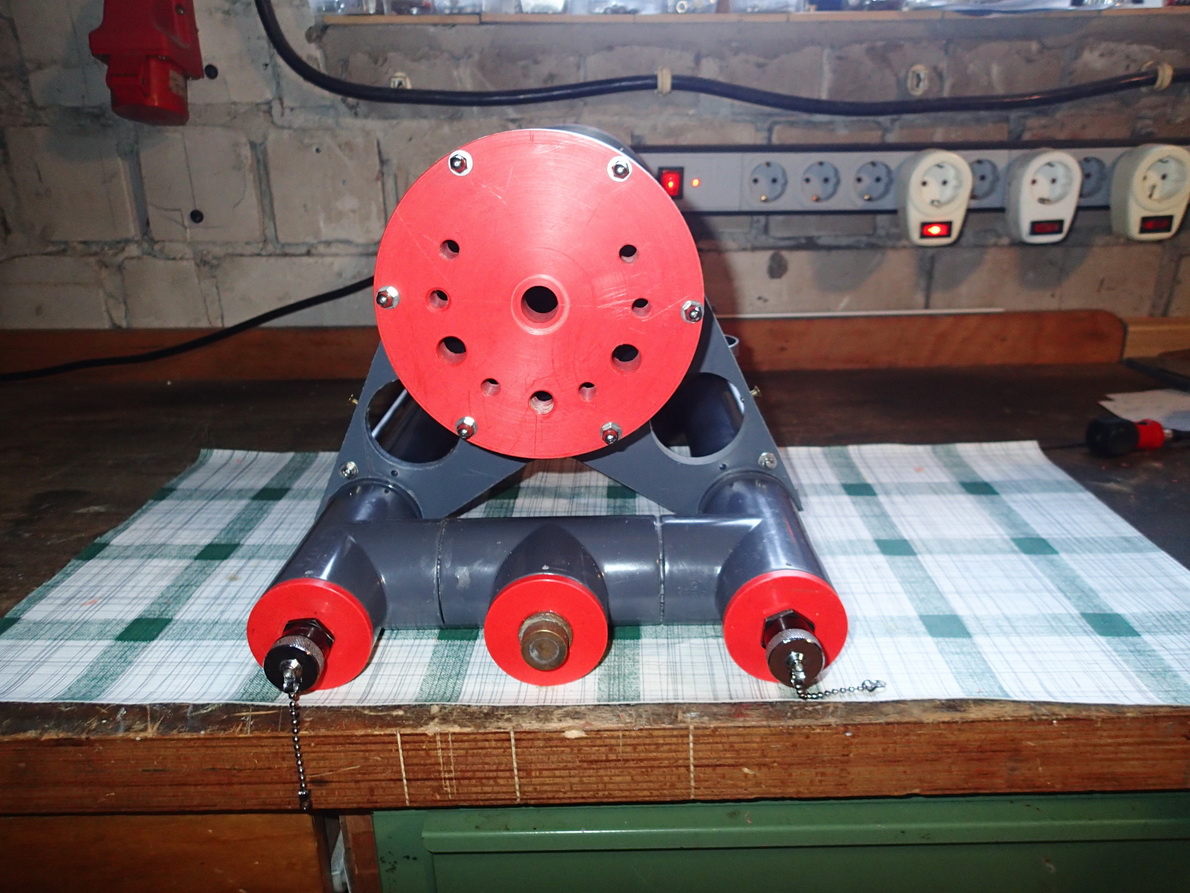
Die Thruster für den horizontalen Antrieb werden in den großen Öffnungen im hinteren Gestellteil eingebaut, für den Vertikalantrieb wird eine verschiebbbare Platte als Träger verwendet, um die Thruster möglichst genau unter dem Schwerpunkt platzieren zu können.
Einzelheiten zu den Thrustern sind in einem eigenen Abschnitt zu finden.
Beleuchtung
Für die Beleuchtung werden handelsübliche 5,5 W LED-Strahler verwendet, die in Gehäusen aus PVC untergebracht sind, die ebenfalls in Öffnungen im vorderen Teil des Gestells stecken. Dimmbar sind diese Strahler nicht, dafür gibt es aus meiner Sicht im Moment auch keine Notwendigkeit.
Kabel und Durchführungen
Die Bauteile hierfür stammen ausa dem Hause modelluboot.de (Norbert Brüggen). Kabel und Stecker sind 3- und 4-polig erhältlich. Die Buchsen für die Stecker (beide verschraubbar) wurden mittels Gewinde M8x0,5 mm in den Gehäusedeckel eingebaut, wobei es nicht möglich war, dieses feine Gewinde in das PVC zu schneiden. Es mussten Messingadapter mit Außengewinde M10x1 mm (Elektrogewinde) und Innengewinde M8x0,5 mm gebaut werden, um das Problem zu lösen. Die Kabeldurchführungen haben normale metrische Gewinde. Die Abdichtung erfolgt über O-Ringe. Die großen Durchführungen für die Stromkabel stammen von DEV-Pein.
Tether
Aus so ein Wort, dass nichts anderes als "Leine" bedeutet, aber was soll's, wenn es nur der eindeutigen Verständigung dient.
Wenn man so die Frage der Einsatztiefe von ROV's im Internet nachliest, dann ist da gern von 50 oder 100 m die Rede, wobei anscheinend immer nur die Druckfestigkeit der Bauteile betrachtet wird. Die dürfte aber nicht das Problem sein, denn es gibt reichlich Lösungen. Vergessen wird da eher die Tatsache, dass diese Tiefen in der normalen Binnenseen wegen des flachen Böschungswinkels erst in großen Entfernungen vom Ufer erreicht werden. Steinbrüche oder Steilwände wie im Bodensee sind ja eher selten. Damit rückt die Frage des Kabelgewichts und die der Möglichkeit, das ROV bei Systemausfall sicher zurückzuholen, mehr in den Vordergrund. Da kommt nun der Tether ins Spiel.
So ein Ding ist jedenfalls aus zwei Gründen sehr nützlich. Zuerst einmal für die Sicherheit, damit man sein wertvolles ROV zur Not auch mal zurückholen kann, denn technische Probleme gibt es immer mal (man will ja nicht am Kabel und am Stecker ziehen). Zweitens ist da noch das Steuerkabel, das bei der normalen Ausführung schwerer als Wasser ist und ohne zusätzliche Maßnahmen auf dem Grund liegen und die Fahrt des ROV behindern würde oder es aber durch das zusätzliche Gewicht in die Tiefe zieht. Ein Weg wäre nun, an dem Kabel zusätzliche Auftriebskörper zu befestigen, aber das hätte einen zusätzlichen Wasserwiderstand zur Folge. Weiterhin lässt sich das Kabel dann schlecht aufwickeln.
Meine Idee ist, Leine und Kabel zu verbinden, wobei eine schwimmfähige Leine aus Polypropylen verwendet werden soll, wie wir sie auch zum Eistauchen als Sicherheitsleine verwenden. 8 mm Leinendurchmesser sind auf jeden Fall ausreichend, das Kabel zu tragen. Besser wäre es natürlich, wenn 6 oder 7 mm ausreichen würden. Das muss aber noch getestet werden. Ein fast schwebendes Kabel wäre da schon zu realisieren. Zum Verbinden von Leine und Kabel kann man ganz kleine Kabelbinder verwenden, oder aber, wenn man sich mehr Mühe geben will, werden beide durch kurze Abschnitte eines passenden Schrumpfschlauches gezogen, die dann vorsichtig erwärmt werden. Macht zwar wirklich Arbeit, sieht aber gut aus.
Es ist auch noch geplant, im Frühjahr, wenn das Wetter wieder wärmer ist, mit ROV2 Schleppversuche an der Oberfläche mit einer 8mm-Leine zu machen, um zu sehen, was da möglich ist. 80 m für einen Test stehen jedenfalls zur Verfügung
Steuerelektronik
Hier wird in der ersten Phase eine normale 40 MHz-Fernsteuerung eingesetzt, die das Tauchen bis etwa 5 m Tiefe erlaubt. Das dient lediglich zum Testen des Fahr- und Tauchverhaltens. Damit kann man zuerst die mechanischen Probleme lösen, ohne sich mit komplizierten elektronischen Bauelementen zu beschäftigen.
Für das, was danach kommen wird, gibt es zwei Möglichkeiten. ROV-CONTROL bietet mit X-CONTROL ein System an, das verhältnismäßig aufwendig ist, aber alle Möglichkeiten offen hält (Anmerkung: Stand 2018, ROV-Control gibt es nicht mehr, der Text bleibt aber der Vollständigkeit halber drin). Von Norbert Brüggen wird ein einfacheres System angeboten, das auf der Landseite den Einsatz der Fernsteuerung über ein kleines Elektronikmodul erlaubt (dann aber mit Kabelverbindung 4-polig). Dabei wird das Summensignal der Fernsteuerung verwendet. Ebenso soll es möglich sein, nur die Regler der Fernsteuerung zu benutzen (das klappt jetzt auch problemlos. damit ist der Aufbau einer eigenen Steuereinheit einfach möglich). Im Gehäuse des ROV sitzt dann das Gegenstück, die 4 Pole reichen für die Steuerung und die Video-Übertragung, was die Handhabung vereinfacht. Aus diesem Grund werde ich dieses System einsetzen, denn der Aufwand hält sich in Grenzen und die Funktionen reichen aus. Bei ROV-Control gibt es allerdings einzelne Bauteile, die für Neukonstruktionen gerade größerer ROV's interessant sein können. Die Teile stammen von Blue Robotics aus den USA und auf deren Homepage kann man sich gut informieren. Eine Internetsuche bringt da sehr viele Beiträge zu technischen Einzelheiten.
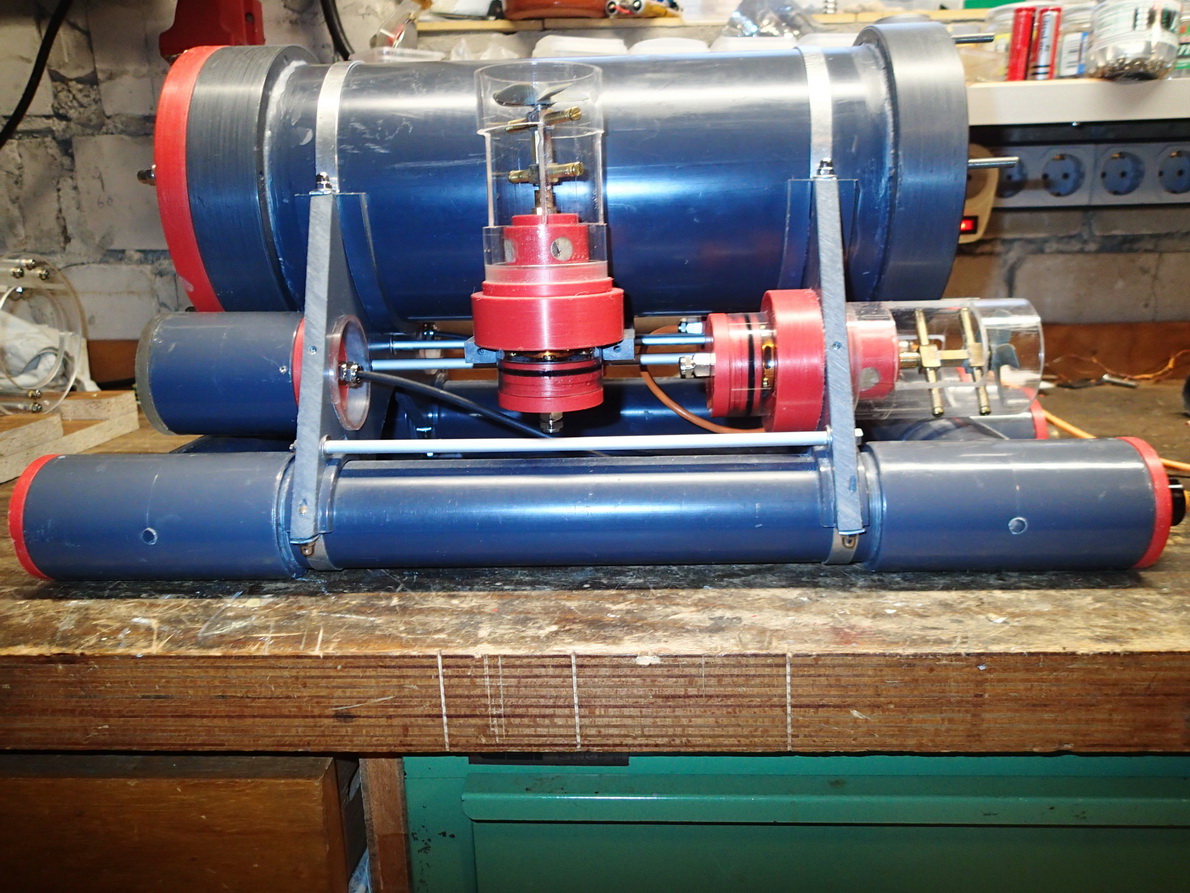
Vido-Übertragung
Bisher wird von den ROV-Konstrukteuren die HERO eingesetzt, da dort anscheinend das Videosignal einfach abzugreifen ist. Diese Kamera hat aber ihren Preis und so habe ich den Einsatz meiner vorhandenen Videokamera (Panasonic) vorgesehen. Das Videosignal kann über einen handelsüblichen Stecker abgegriffen werden, die Aufnahme wird durch einen Servo, der einen Stößel betätigt, ausgelöst und die Stromversorgung erfolgt über ein step-down-Regler (Spannung 9 V). Sollte es mal Platzprobleme geben, kann die Kamera immer noch gegen ein preiswertes kleines Modell ausgetauscht werden.
|
| |
| |
Erfahrungen
Hier soll nun alles gesammelt werden, was sich aus der Erprobung ergeben hat, insbesondere auch Fehler und Unzulänglichkeiten, damit man diese Dinge bei eigenen (weiteren) Projekten vermeiden kann. Aus Fehlern lernt man immer noch am besten, auch aus fremden.
Bisher liegt hier noch nichts aus der praktischen Erprobung vor, wohl aber ein generelles konstruktives Problem, das sich durch bisher alle Exemplare zieht. Manchmal sollten Dinge auch bis zum bitteren Ende überlegt werden, bevor man mit dem Bau anfängt.
Dieses Problem ist die Tatsache, dass hier bereits alle Bauteile auf einem zentralen Geräteträger verbaut sind, der am hinteren Deckel befestigt ist. Der Gedanke ansich ist schon in Ordnung, aber um den Deckel mit dem daran befestigten Innenteil für Bauarbeiten aus dem Gehäuse zu entfernen, müssen alle Stecker außen am Deckel demontiert werden. Der Aufwand hält sich zwar in Grenzen, die Frage ist nur, wie lange diese feinen Verbindungen das durchhalten.
Die Lösung ist auch recht einfach, man hätte nur rechtzeitig daran denken sollten. Auf den Deckel wird innen eine Platte montiert, die mit Federleisten versehen ist (hier die Federleisten, damit keine spannungsführenden Kontakte freiliegen). Die entsprechenden Messerleisten sitzen auf ebenso einer Platte an der Rückseite des Geräteträgers. Nun kann man diesen einfach entnehmen, indem man den vorderen Gehäusedeckel entfernt (keine Anbauten stören) und ihn aus dem Gehäuse zieht. Falls das nur schwer geht, kann man auch den hinteren Deckel lösen, alles ein Stück herausziehen (dazu reichen die Kabellängen immer) und die Teile trennen. Dann kann man frei daran rumschrauben unf -löten. Falls man für einen Test nicht alles wieder montieren will, kann man sich einen Hilfsträger bauen, der auf der einen Seite ebenfalls die genannten Messerleisten hat, an die dann ein Kabelbaum mit den entsprechenden Buchsen montiert ist. So kann man alles außerhalb des ROV-Gehäuses zusammenstecken und testen.
|
| |